近日,浙江大学对一名72岁四肢瘫痪老人,实施国内首例“脑机接口”临床手术,并取得成功。患者通过这项技术,只要运用大脑运动皮层信号,就能控制机械手完成动作。
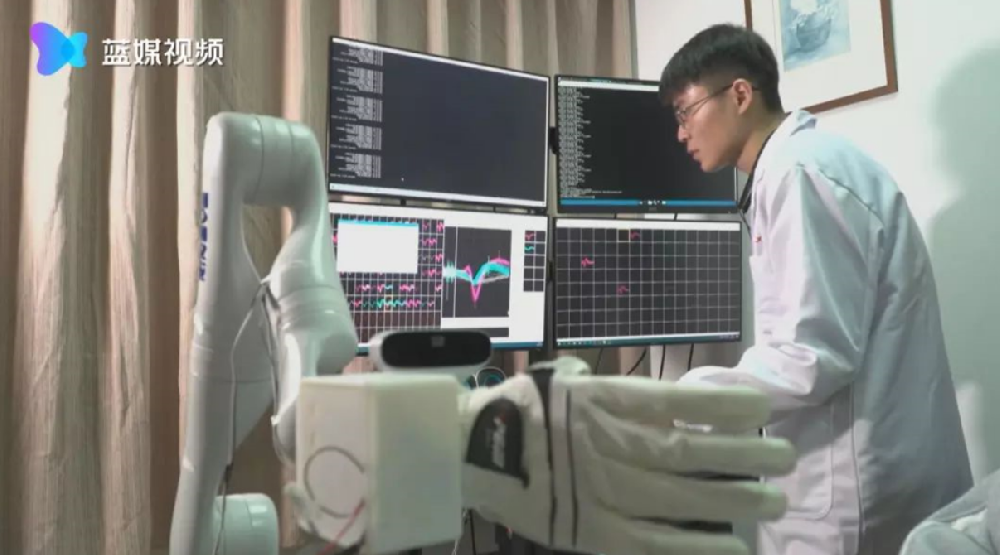
正在运用大脑运动皮层信号,控制机械臂的就是刚做了“脑机接口”手术,现年72岁的张先生。两年前,一场车祸造成张老第四颈髓层面损伤,四肢完全瘫痪。手术后,经过系统训练,他不仅可以握手,还能拿饮料、吃油条,只不过这些动作是他用“意念”控制外部机械臂及机械手完成的。
抓、握、移,这些对常人来说再简单不过的动作,背后却是信号发送、传输和解码等一系列复杂的过程。因此,这一“转念”之间的过程,对像张先生这样脊髓神经损伤、运动功能丧失的残障人士而言,是不可能完成的任务。
脑机接口技术带来福音

所谓 脑机接口,就是在大脑和假肢等外部设备之间建立一条直接传输大脑指令的通道,实现在脊髓及运动神经通路损坏但大脑皮层功能尚健全的情况下,脑部的信号也能通过计算机解读,直接控制外部设备。
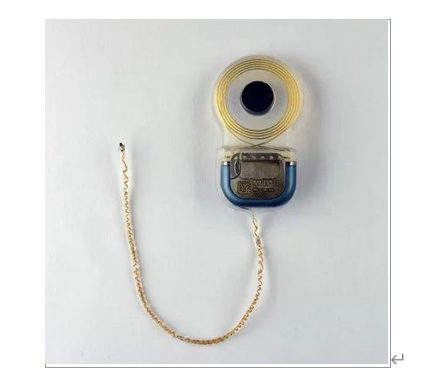
现在最新成果是把微电极阵列直接插入大脑运动皮层里面,是植入式操作,可以检测单个神经元细胞放电情况,获取的信号更直接、稳定和丰富。
机器人辅助手术 精准!
大脑皮层神经元共分为6层,实验需要将电极植入到第5层的位置。电极植入的位置太浅了达不到效果,太深了又会损伤其他神经,难度非常大。
挑战从如何在尽量减少损伤的情况下将微电极准确无误地植入患者大脑开始。

团队利用步进为0.1毫米的手术机器人,准确地将2个微电极阵列送入既定位置,误差控制在0.5毫米以内。这也是全球首例成功利用手术机器人辅助方式完成电极植入手术。
非线性神经网络算法
实现意念操控
接下来的关键一步就是如何实现“意念操控”。团队介绍说,人的大脑中上千亿个神经元通过发出微小的电脉冲相互交流,从而对人体的一举一动发号施令,要实现意念控制,就要对电极检测范围内的人脑神经电信号进行实时采集和解码,将不同的电信号特征与机械手臂的动作匹配对应。

由于脑机接口技术同时依赖患者脑电信号特征及机器算法设计,目前还没有统一标准化的信号采集、解码等分析手段。后来,团队引入非线性、神经网络算法,提出了针对这一例高龄患者的个性化解决方案。

“相对于中青年患者,老年患者的脑电信号质量与稳定性都要差些,我们设计的非线性解码器更能‘读懂’老年人的心思,能够帮助患者更好地在反馈式学习中掌握如何操控机械臂与机械手。”

把“脑机接口”运用到人脑上,浙大团队先后进行了10多年研究。目前这项技术已达到世界先进水平。
记者|高晨妍 邵大望
来源|浙江新闻联播 浙江大学官微
责编|孙宇
编辑|余元江
本则新闻来源
https://mp.weixin.qq.com/s/SOoG6E5sNMlPDo0GrqduVA